State-space model. More...
#include <StateSpaceModel.h>
Public Types | |
| using | StateDimVector = Eigen::Matrix< double, StateDim, 1 > |
| Type of state vector. More... | |
| using | InputDimVector = Eigen::Matrix< double, InputDim, 1 > |
| Type of input vector. More... | |
| using | OutputDimVector = Eigen::Matrix< double, OutputDim, 1 > |
| Type of output vector. More... | |
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | StateSpaceModel (int state_dim=StateDim, int input_dim=InputDim, int output_dim=OutputDim) |
| Constructor. More... | |
| virtual | ~StateSpaceModel ()=default |
| Destructor. More... | |
| int | stateDim () const |
| Gets the state dimension. More... | |
| int | inputDim () const |
| Gets the input dimension. More... | |
| int | outputDim () const |
| Gets the output dimension. More... | |
| StateDimVector | stateEq (const StateDimVector &x, const InputDimVector &u) const |
| Calculate the continuous state equation. More... | |
| StateDimVector | stateEqDisc (const StateDimVector &x, const InputDimVector &u) const |
| Calculate the discrete state equation. More... | |
| OutputDimVector | observEq (const StateDimVector &x) const |
| Calculate the observation equation. More... | |
| OutputDimVector | observEq (const StateDimVector &x, const InputDimVector &u) const |
| Calculate the observation equation. More... | |
| void | calcDiscMatrix (double dt) |
| Calculate the discrete system matrices \(\boldsymbol{A}_d, \boldsymbol{B}_d, \boldsymbol{e}_d\). More... | |
Public Attributes | |
| const int | state_dim_ = 0 |
| State dimension. More... | |
| const int | input_dim_ = 0 |
| Input dimension. More... | |
| const int | output_dim_ = 0 |
| Output dimension. More... | |
| Eigen::Matrix< double, StateDim, StateDim > | A_ |
| Matrix \(\boldsymbol{A}\) of continuous state equation. More... | |
| Eigen::Matrix< double, StateDim, InputDim > | B_ |
| Matrix \(\boldsymbol{B}\) of continuous state equation. More... | |
| Eigen::Matrix< double, OutputDim, StateDim > | C_ |
| Matrix \(\boldsymbol{C}\) of observation equation. More... | |
| Eigen::Matrix< double, OutputDim, InputDim > | D_ |
| Matrix \(\boldsymbol{D}\) of observation equation. More... | |
| StateDimVector | E_ |
| Offset vector \(\boldsymbol{e}\) of continuous state equation. More... | |
| OutputDimVector | F_ |
| Offset vector \(\boldsymbol{f}\) of observation equation. More... | |
| double | dt_ = 0 |
| Discretization timestep [sec] (zero if discrete coefficients are not initialized) More... | |
| Eigen::Matrix< double, StateDim, StateDim > | Ad_ |
| Matrix \(\boldsymbol{A}_d\) of discrete state equation. More... | |
| Eigen::Matrix< double, StateDim, InputDim > | Bd_ |
| Matrix \(\boldsymbol{B}_d\) of discrete state equation. More... | |
| StateDimVector | Ed_ |
| Offset vector \(\boldsymbol{e}_d\) of discrete state equation. More... | |
Detailed Description
template<int StateDim, int InputDim, int OutputDim>
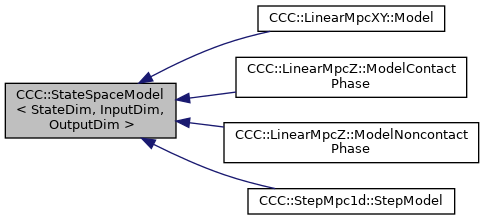
class CCC::StateSpaceModel< StateDim, InputDim, OutputDim >
State-space model.
- Template Parameters
-
StateDim state dimension InputDim input dimension OutputDim output dimension
\begin{align*} \boldsymbol{\dot{x}} &= \boldsymbol{A} \boldsymbol{x} + \boldsymbol{B} \boldsymbol{u} + \boldsymbol{e} \\ \boldsymbol{y} &= \boldsymbol{C} \boldsymbol{x} + \boldsymbol{D} \boldsymbol{u} + \boldsymbol{f} \end{align*}
Definition at line 21 of file StateSpaceModel.h.
Member Typedef Documentation
◆ InputDimVector
| using CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::InputDimVector = Eigen::Matrix<double, InputDim, 1> |
Type of input vector.
Definition at line 28 of file StateSpaceModel.h.
◆ OutputDimVector
| using CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::OutputDimVector = Eigen::Matrix<double, OutputDim, 1> |
Type of output vector.
Definition at line 31 of file StateSpaceModel.h.
◆ StateDimVector
| using CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::StateDimVector = Eigen::Matrix<double, StateDim, 1> |
Type of state vector.
Definition at line 25 of file StateSpaceModel.h.
Constructor & Destructor Documentation
◆ StateSpaceModel()
|
inline |
Constructor.
- Parameters
-
state_dim state dimension input_dim input dimension output_dim output dimension
- Note
- dimensions in parameter can be omitted if a fixed value is given in the template value.
Definition at line 42 of file StateSpaceModel.h.
◆ ~StateSpaceModel()
|
virtualdefault |
Destructor.
- Note
- Need to make class polymorphic. See https://stackoverflow.com/a/15114118
Member Function Documentation
◆ calcDiscMatrix()
|
inline |
Calculate the discrete system matrices \(\boldsymbol{A}_d, \boldsymbol{B}_d, \boldsymbol{e}_d\).
- Parameters
-
dt discretization timestep [sec]
\begin{align*} \boldsymbol{x}_{k+1} = \boldsymbol{A}_d \boldsymbol{x}_k + \boldsymbol{B}_d \boldsymbol{u}_k + \boldsymbol{e}_d \end{align*}
Definition at line 164 of file StateSpaceModel.h.
◆ inputDim()
|
inline |
Gets the input dimension.
Definition at line 107 of file StateSpaceModel.h.
◆ observEq() [1/2]
|
inline |
Calculate the observation equation.
- Parameters
-
x state \(\boldsymbol{x}\)
- Returns
- observation \(\boldsymbol{y}\)
Definition at line 142 of file StateSpaceModel.h.
◆ observEq() [2/2]
|
inline |
Calculate the observation equation.
- Parameters
-
x state \(\boldsymbol{x}\) u input \(\boldsymbol{u}\)
- Returns
- observation \(\boldsymbol{y}\)
Definition at line 152 of file StateSpaceModel.h.
◆ outputDim()
|
inline |
Gets the output dimension.
Definition at line 113 of file StateSpaceModel.h.
◆ stateDim()
|
inline |
Gets the state dimension.
Definition at line 101 of file StateSpaceModel.h.
◆ stateEq()
|
inline |
Calculate the continuous state equation.
- Parameters
-
x state \(\boldsymbol{x}\) u input \(\boldsymbol{u}\)
- Returns
- time derivative of state \(\boldsymbol{\dot{x}}\)
Definition at line 123 of file StateSpaceModel.h.
◆ stateEqDisc()
|
inline |
Calculate the discrete state equation.
- Parameters
-
x current state \(\boldsymbol{x}_k\) u current input \(\boldsymbol{u}_k\)
- Returns
- next state \(\boldsymbol{x}_{k+1}\)
Definition at line 133 of file StateSpaceModel.h.
Member Data Documentation
◆ A_
| Eigen::Matrix<double, StateDim, StateDim> CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::A_ |
Matrix \(\boldsymbol{A}\) of continuous state equation.
Definition at line 229 of file StateSpaceModel.h.
◆ Ad_
| Eigen::Matrix<double, StateDim, StateDim> CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::Ad_ |
Matrix \(\boldsymbol{A}_d\) of discrete state equation.
Definition at line 250 of file StateSpaceModel.h.
◆ B_
| Eigen::Matrix<double, StateDim, InputDim> CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::B_ |
Matrix \(\boldsymbol{B}\) of continuous state equation.
Definition at line 232 of file StateSpaceModel.h.
◆ Bd_
| Eigen::Matrix<double, StateDim, InputDim> CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::Bd_ |
Matrix \(\boldsymbol{B}_d\) of discrete state equation.
Definition at line 253 of file StateSpaceModel.h.
◆ C_
| Eigen::Matrix<double, OutputDim, StateDim> CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::C_ |
Matrix \(\boldsymbol{C}\) of observation equation.
Definition at line 235 of file StateSpaceModel.h.
◆ D_
| Eigen::Matrix<double, OutputDim, InputDim> CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::D_ |
Matrix \(\boldsymbol{D}\) of observation equation.
Definition at line 238 of file StateSpaceModel.h.
◆ dt_
| double CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::dt_ = 0 |
Discretization timestep [sec] (zero if discrete coefficients are not initialized)
Definition at line 247 of file StateSpaceModel.h.
◆ E_
| StateDimVector CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::E_ |
Offset vector \(\boldsymbol{e}\) of continuous state equation.
Definition at line 241 of file StateSpaceModel.h.
◆ Ed_
| StateDimVector CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::Ed_ |
Offset vector \(\boldsymbol{e}_d\) of discrete state equation.
Definition at line 256 of file StateSpaceModel.h.
◆ F_
| OutputDimVector CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::F_ |
Offset vector \(\boldsymbol{f}\) of observation equation.
Definition at line 244 of file StateSpaceModel.h.
◆ input_dim_
| const int CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::input_dim_ = 0 |
Input dimension.
Definition at line 223 of file StateSpaceModel.h.
◆ output_dim_
| const int CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::output_dim_ = 0 |
Output dimension.
Definition at line 226 of file StateSpaceModel.h.
◆ state_dim_
| const int CCC::StateSpaceModel< StateDim, InputDim, OutputDim >::state_dim_ = 0 |
State dimension.
Definition at line 220 of file StateSpaceModel.h.
The documentation for this class was generated from the following file:
- /home/runner/work/CentroidalControlCollection/CentroidalControlCollection/colcon_ws/src/isri-aist/CentroidalControlCollection/include/CCC/StateSpaceModel.h