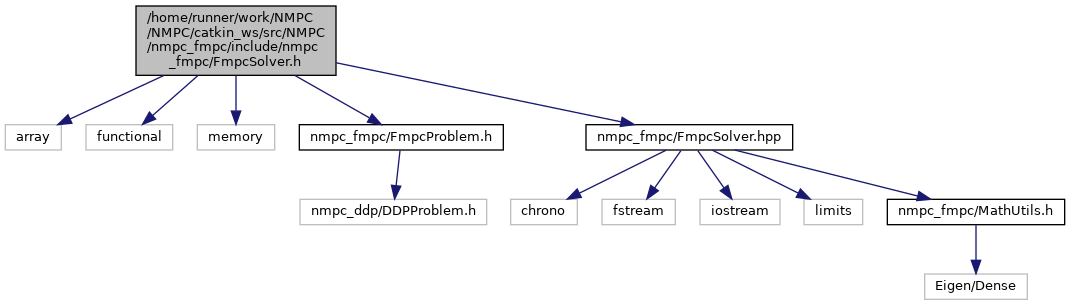
#include <array>#include <functional>#include <memory>#include <nmpc_fmpc/FmpcProblem.h>#include <nmpc_fmpc/FmpcSolver.hpp>
Include dependency graph for FmpcSolver.h:
Go to the source code of this file.
Classes | |
| class | nmpc_fmpc::FmpcSolver< StateDim, InputDim, IneqDim > |
| FMPC solver. More... | |
| struct | nmpc_fmpc::FmpcSolver< StateDim, InputDim, IneqDim >::Configuration |
| Configuration. More... | |
| struct | nmpc_fmpc::FmpcSolver< StateDim, InputDim, IneqDim >::Variable |
| Optimization variables. More... | |
| struct | nmpc_fmpc::FmpcSolver< StateDim, InputDim, IneqDim >::Coefficient |
| Coefficients of linearized KKT condition. More... | |
| struct | nmpc_fmpc::FmpcSolver< StateDim, InputDim, IneqDim >::TraceData |
| Data to trace optimization loop. More... | |
| struct | nmpc_fmpc::FmpcSolver< StateDim, InputDim, IneqDim >::ComputationDuration |
| Data of computation duration. More... | |
Namespaces | |
| nmpc_fmpc | |