Summary
This is a ROS package for representing the kinematic reachability of robots: differentiable reachability map.
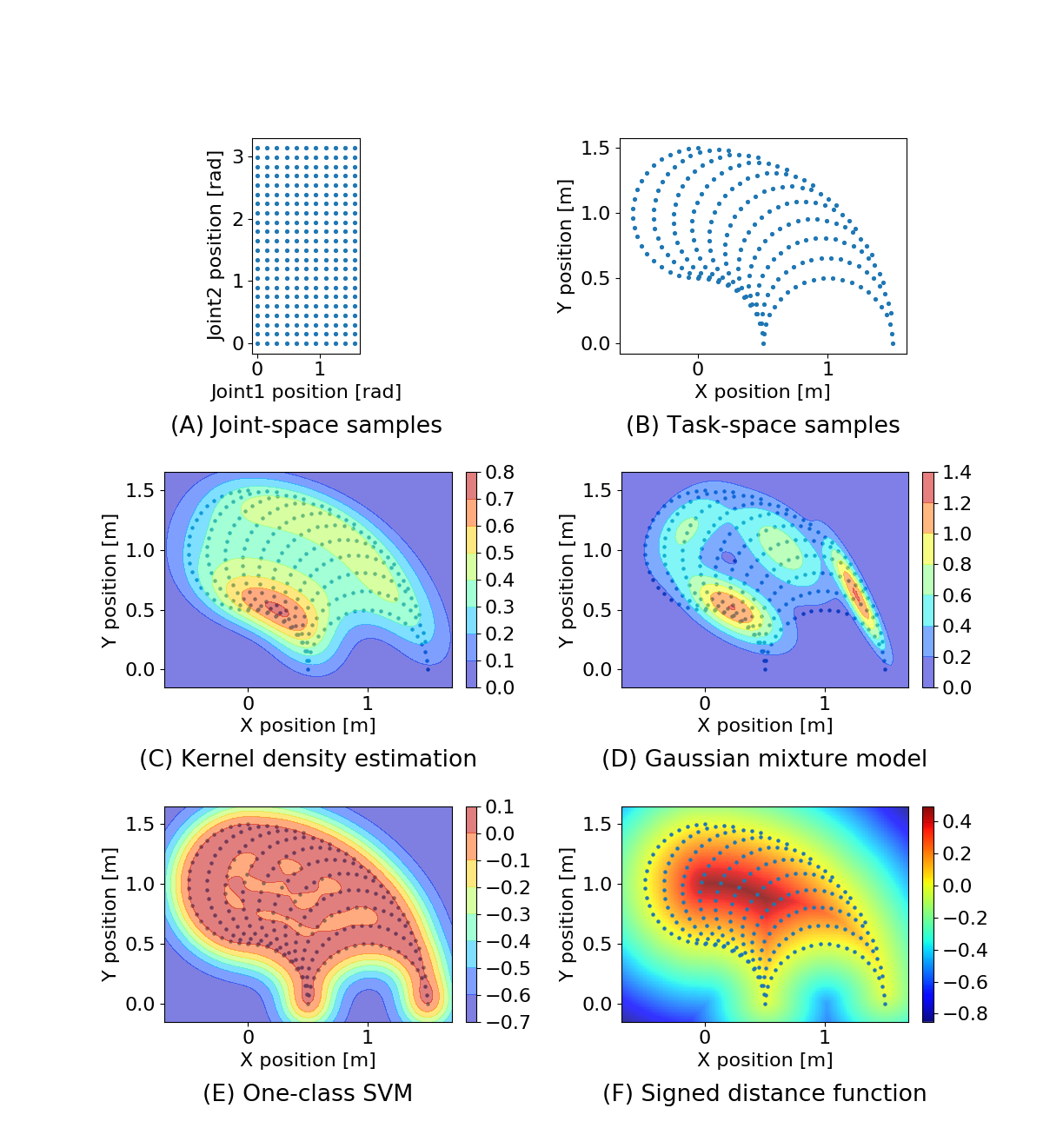
This is a scalar-valued function in task space that is positive only in the region reachable by the robot's end-effector. The main feature is that the scalar-valued function is continuous and differentiable with respect to task-space coordinates. This allows us to formulate the reachability conditions of the robot's end-effectors using reachability maps in continuous optimization for motion planning. The differentiable reachability map is learned using a support vector machine from a sample set of end-effector poses generated from a robot kinematic model.
Install
Dependencies
Packages not supported by rosdep
Packages supported by rosdep
Installation procedure
It is assumed that ROS is installed.
- Install mc_rtc Installation via apt is recommended. See here.
- Install jrl-qp $ git clone https://github.com/jrl-umi3218/jrl-qp -b topic/BlockStructure --recursive$ mkdir build$ cd build$ cmake .. -DBUILD_TESTING=OFF -DBUILD_BENCHMARKS=OFF$ make$ make install
- Setup catkin workspace and build $ mkdir -p ~/ros/ws_differentiable_rmap/src$ cd ~/ros/ws_differentiable_rmap$ wstool init src$ wstool set -t src isri-aist/optmotiongen git@github.com:isri-aist/optmotiongen.git -v ver2 --git -y$ wstool set -t src isri-aist/differentiable_rmap git@github.com:isri-aist/differentiable_rmap.git --git -y$ wstool update -t src$ source /opt/ros/${ROS_DISTRO}/setup.bash$ rosdep install -y -r --from-paths src --ignore-src$ catkin build -DCMAKE_BUILD_TYPE=RelWithDebInfo -DENABLE_JRLQP=ON
Example with simple 2D manipulator
You can reproduce the results of this video.
Sample set generation
Run either FK-based or IK-based sampling.
FK-based sampling:
IK-based sampling:
### Reachability map learning
### Saving a grid set of reachability map
### Optimization with reachability constraint
## Standalone script for scalar field learning examples
The following image will be displayed.